{% set id_section = "Title" %}
The Toulouse Vanishing Point Dataset (TVPD)
Vincent Angladon1,2, Simone Gasparini1, Vincent Charvillat1
1 Université de Toulouse; INPT – IRIT www.irit.fr
2 Telequid www.telequid.com
{% set id_section = "VP_use" %}
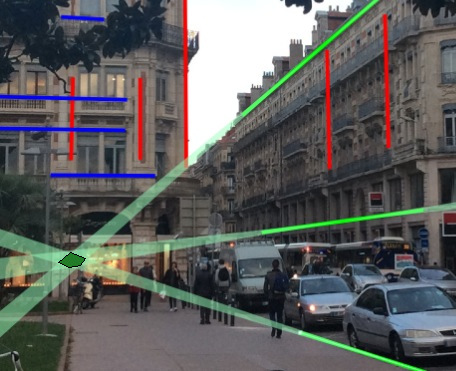
Image understanding and vanishing points
- Image segmentation
- Find rectilinear structures
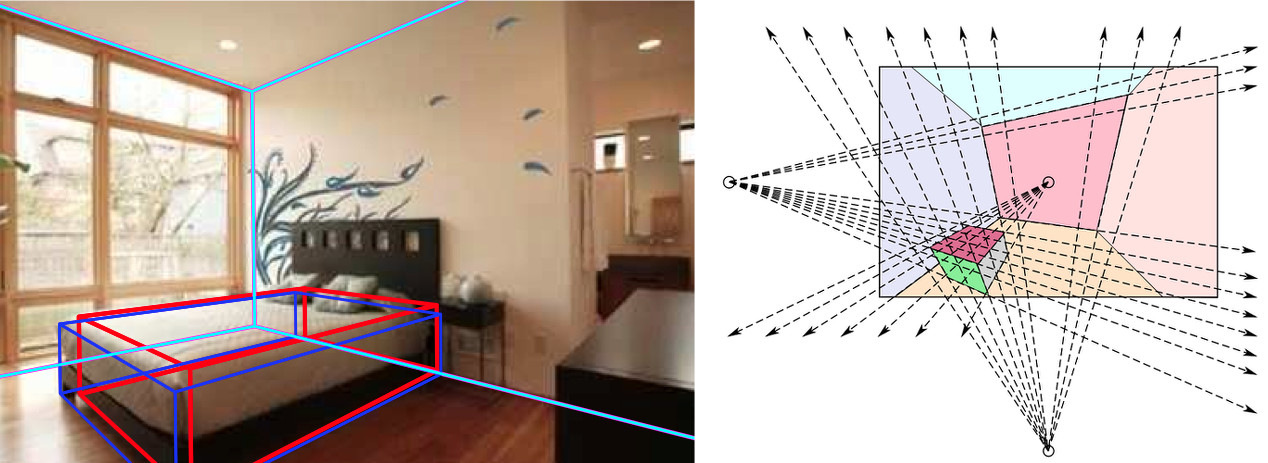
- Spatial layout recovery
{% set id_section = "camera_imu_intro" %}
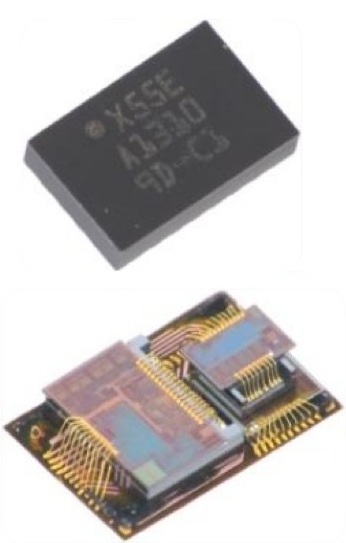
Camera and Inertial Motion Unit (IMU)

 → inertial data
→ inertial data
{% set id_section = "camera_imu_comparison" %}
Fusion IMU -- vision
| IMU | Vision |
|---|---|
Pros:
|
Pros:
|
Cons:
|
Cons:
|
{% set id_section = "introducing_tvpd" %}
A new dataset
A new dataset of still images with vanishing points and IMU data:
the Toulouse Vanishing Point Dataset
the Toulouse Vanishing Point Dataset
{% set id_section = "outline_background" %}
Outline
- Introduction
- Background
- Background on vanishing points
- Background on IMU
- The dataset
- Dataset tools
{% set id_section = "vp_def" %}
Vanishing Point definition

{% set id_section = "Manhattan_def" %}
Manhattan World definition

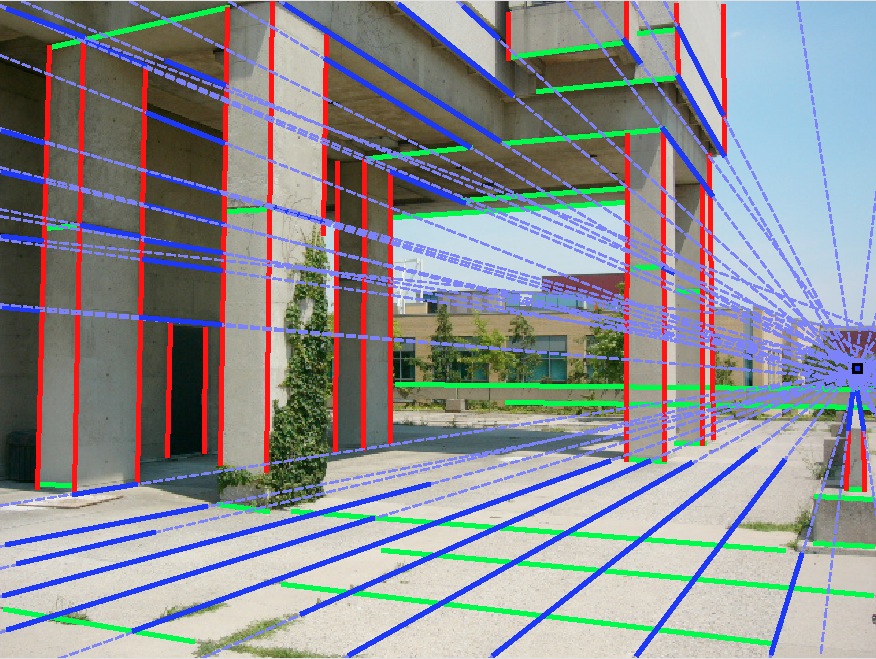
{% set id_section = "vp_manhattan" %}
Vanishing point and Manhattan world
In this case: VP + camera parameters → camera orientation
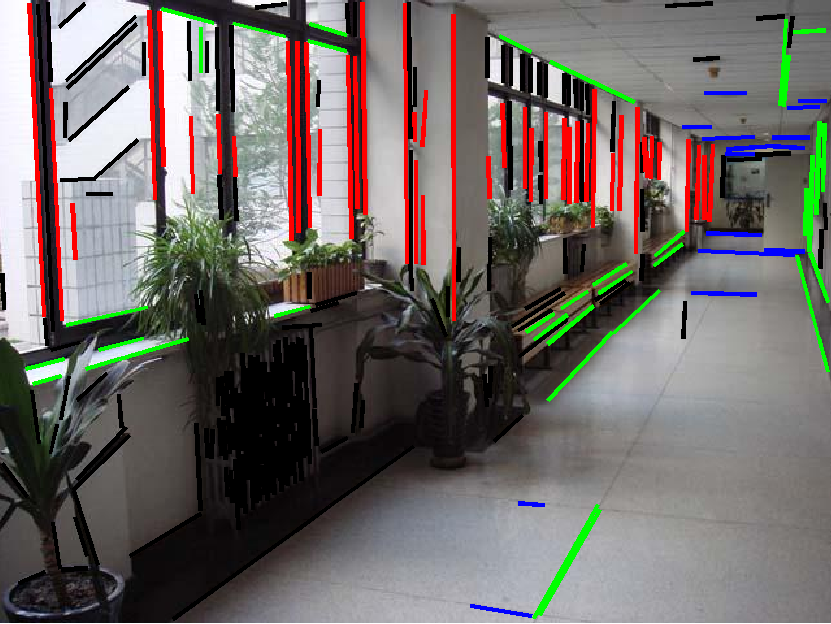
{% set id_section = "vp_detection" %}
Background on VPs detection
Compute features (gradients, edges, lines, line segments, ...)
Cluster the features (Hough, RANSAC, JLinkage, ...)
Compute the lines intersection for each cluster



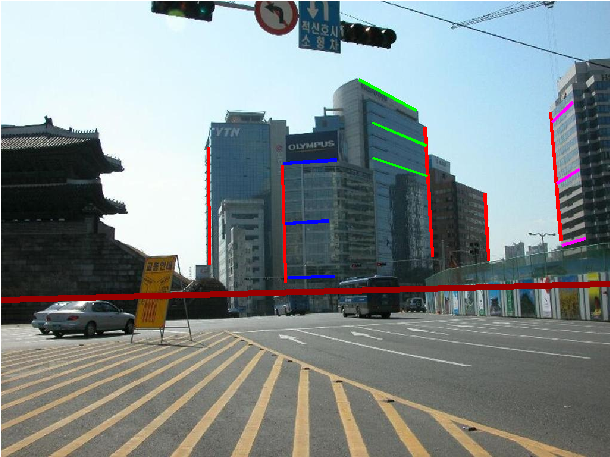
{% set id_section = "vp_detection_manhattan" %}
VP detection in a Manhattan world
Multiple strategies:
- [Tardif2009] seeks the three vps that best satisfy the orthogonality constraint two by two
- [Bazin2012] seeks the orthogonal frame which maximizes the number of clustered segments
- [Antunes2013] orthogonality is enforced in the 2nd layer of his Hierarchical Facility Location problem formulation
{% set id_section = "imu" %}
IMU sensors
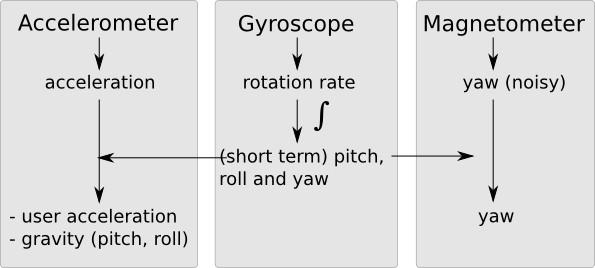
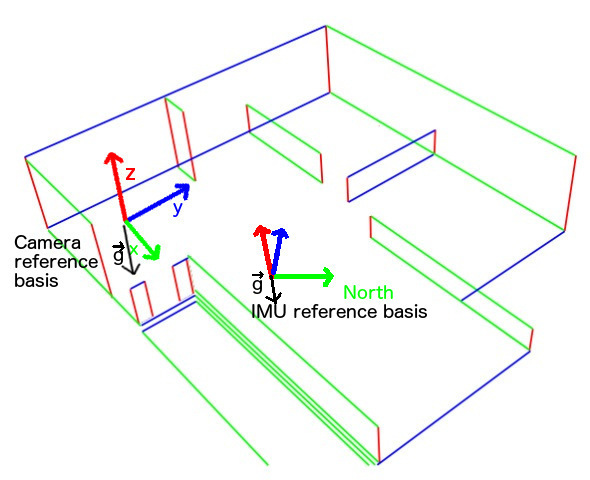
{% set id_section = "imu_vp" %}
IMU -- Vanishing point relationship
{% set id_section = "outline_dataset" %}
Outline
- Introduction
- Background
- The dataset
- The other datasets
- Ground truth creation in the TVPD
- Dataset tools
{% set id_section = "yud" %}
The York Urban Database [Denis2008]
- 102 images of outdoor and indoor scenes 640x480
- Ground truth line segments
- Ground truth VPs computed using [Collins1990]
- Orthogonalization of the Manhattan directions
{% set id_section = "yud_problem" %}
The problem with the York Database
{% set id_section = "other_datasets" %}
Other vanishing point datasets
{% set id_section = "dataset_improvement" %}
The Toulouse Vanishing Point Dataset
- IMU data embedded in each photo
- High resolution photos (1920x1080)
- 114 photos (40 indoor and 74 outdoor)
- Uncertainty regions for the vanishing points
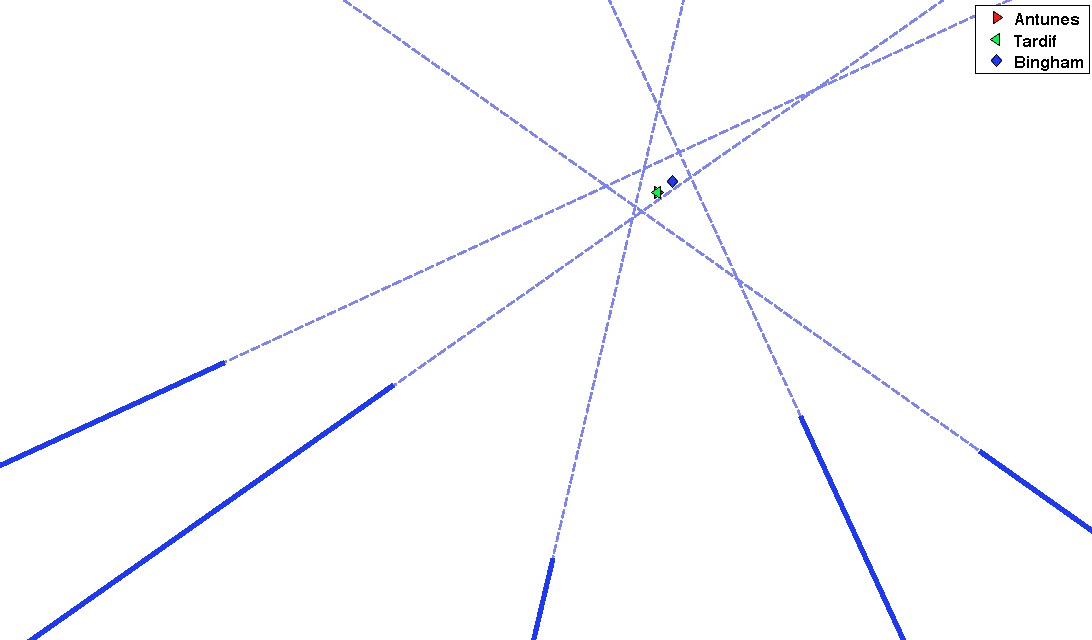
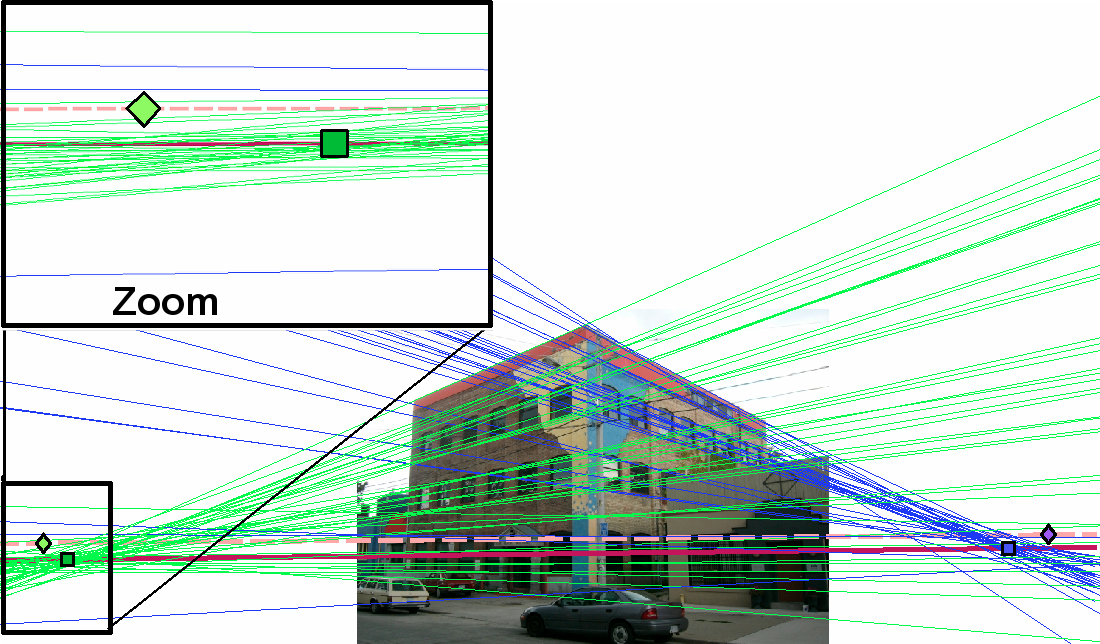
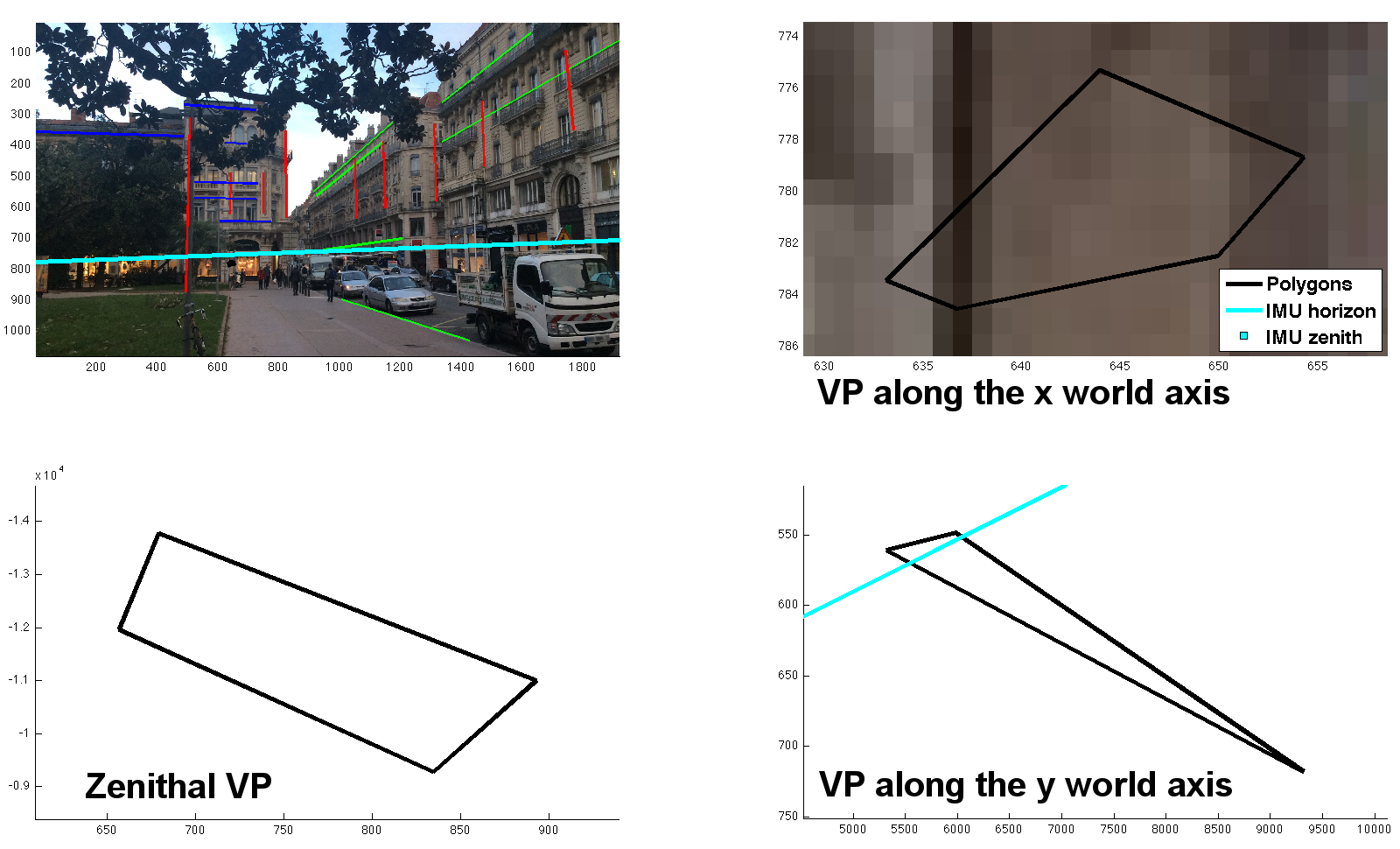
{% set id_section = "uncertainty_modelling" %}
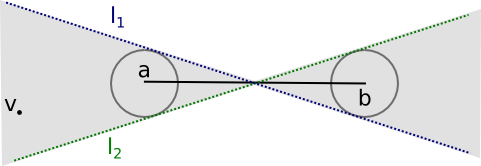
Uncertainty modelling
{% set id_section = "dw_intersection" %}
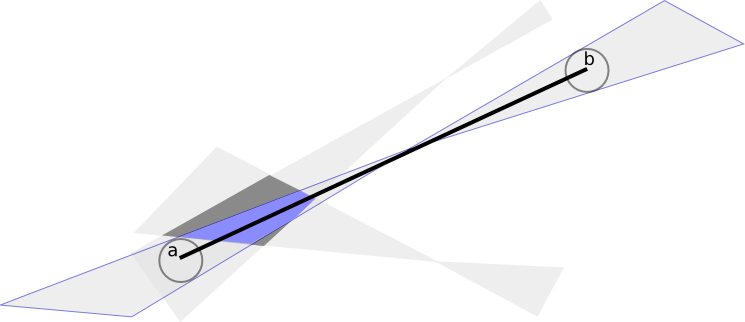
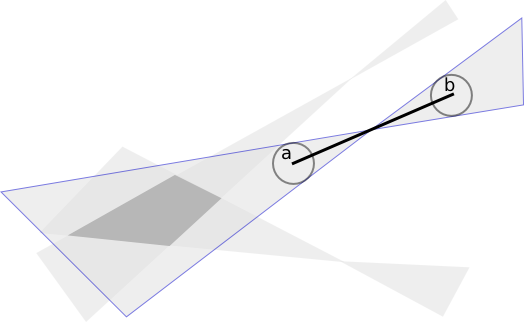
Double wedges intersection

{% set id_section = "dw_properties" %}
Properties of double wedges
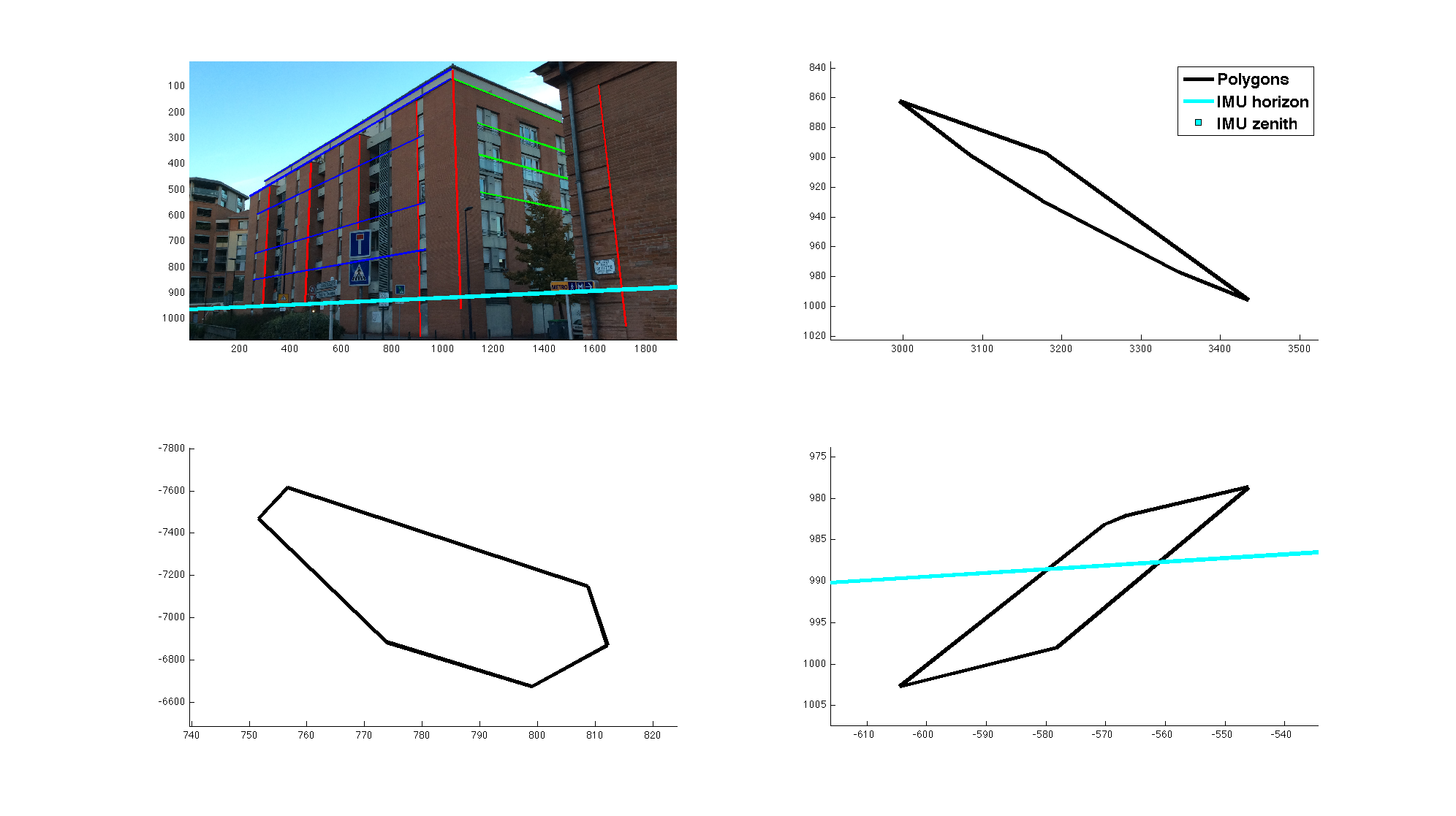
{% set id_section = "result" %}
The computed uncertainty regions
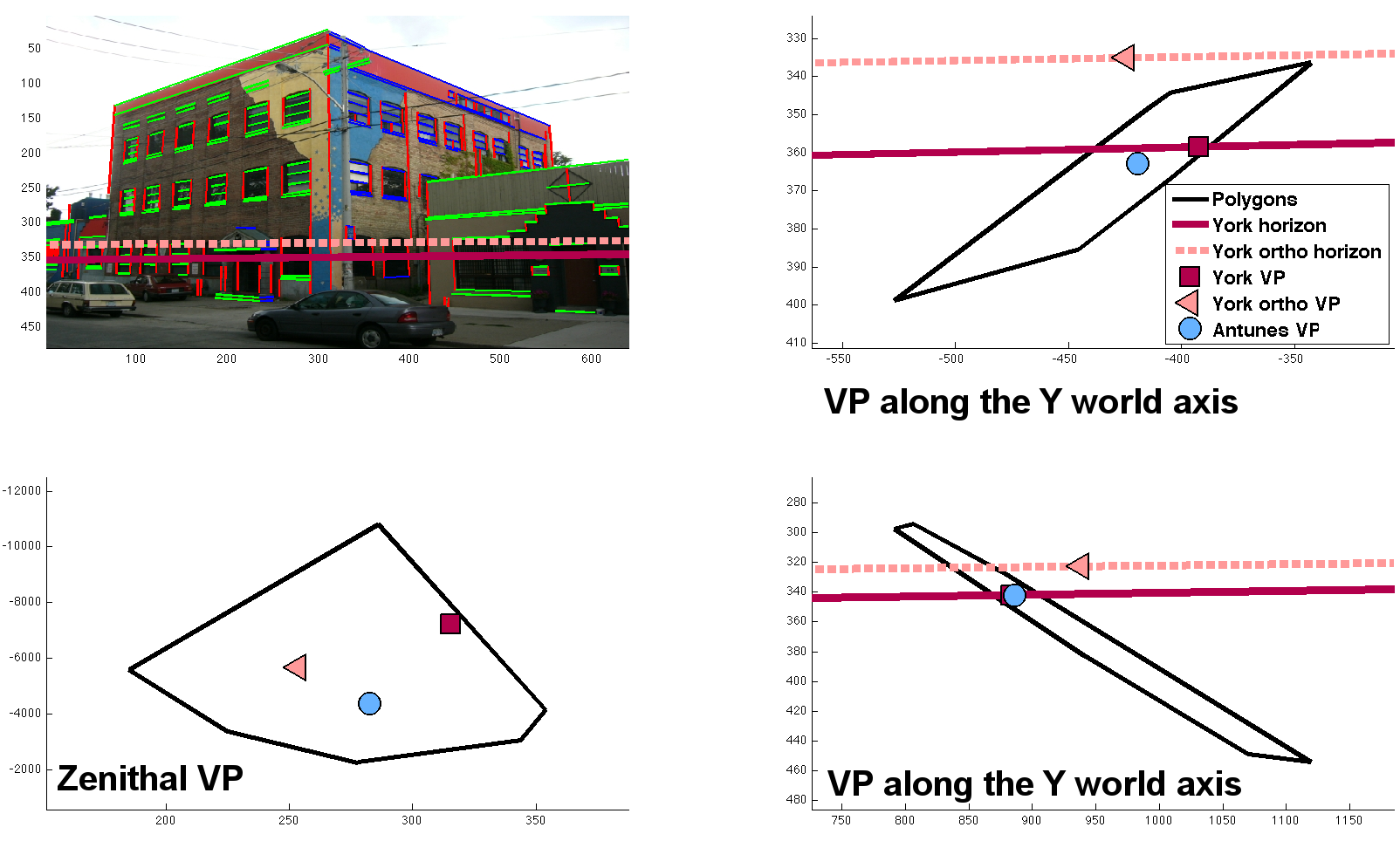
{% set id_section = "yud_comparison" %}
Comparison on the York Urban Database
{% set id_section = "outline_dataset_extension" %}
Outline
- Introduction
- Background
- The dataset
- Dataset tools
- Photo capture
- Line segment creation
- Computation of the uncertainty regions
{% set id_section = "photo_capture" %}
Photo capture
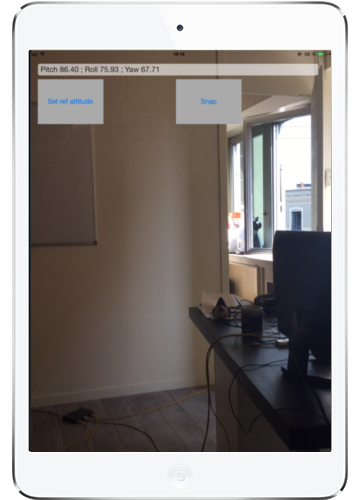
→ Photo with embedded synchronized inertial data
stored in the EXIF UserComment field.
Requires the synchronization of the inertial data
with the camera frames.
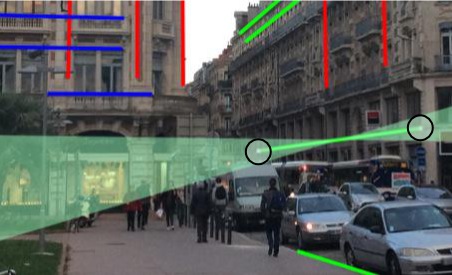
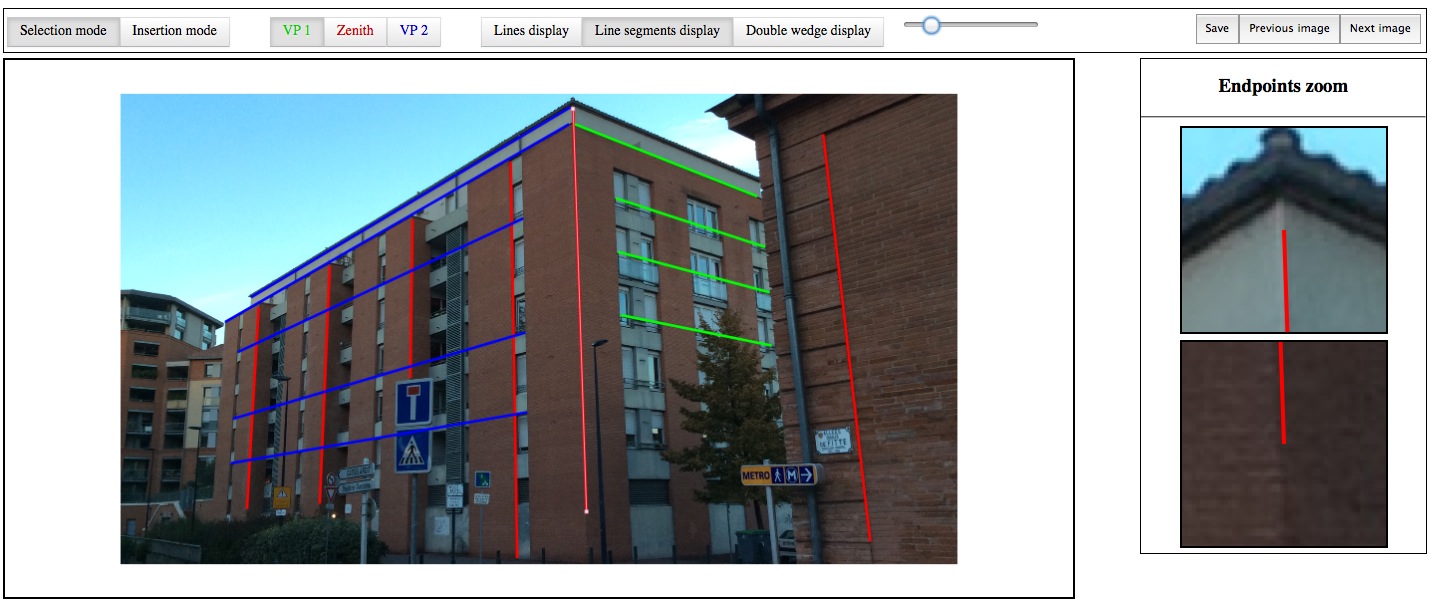
{% set id_section = "gt_creation" %}
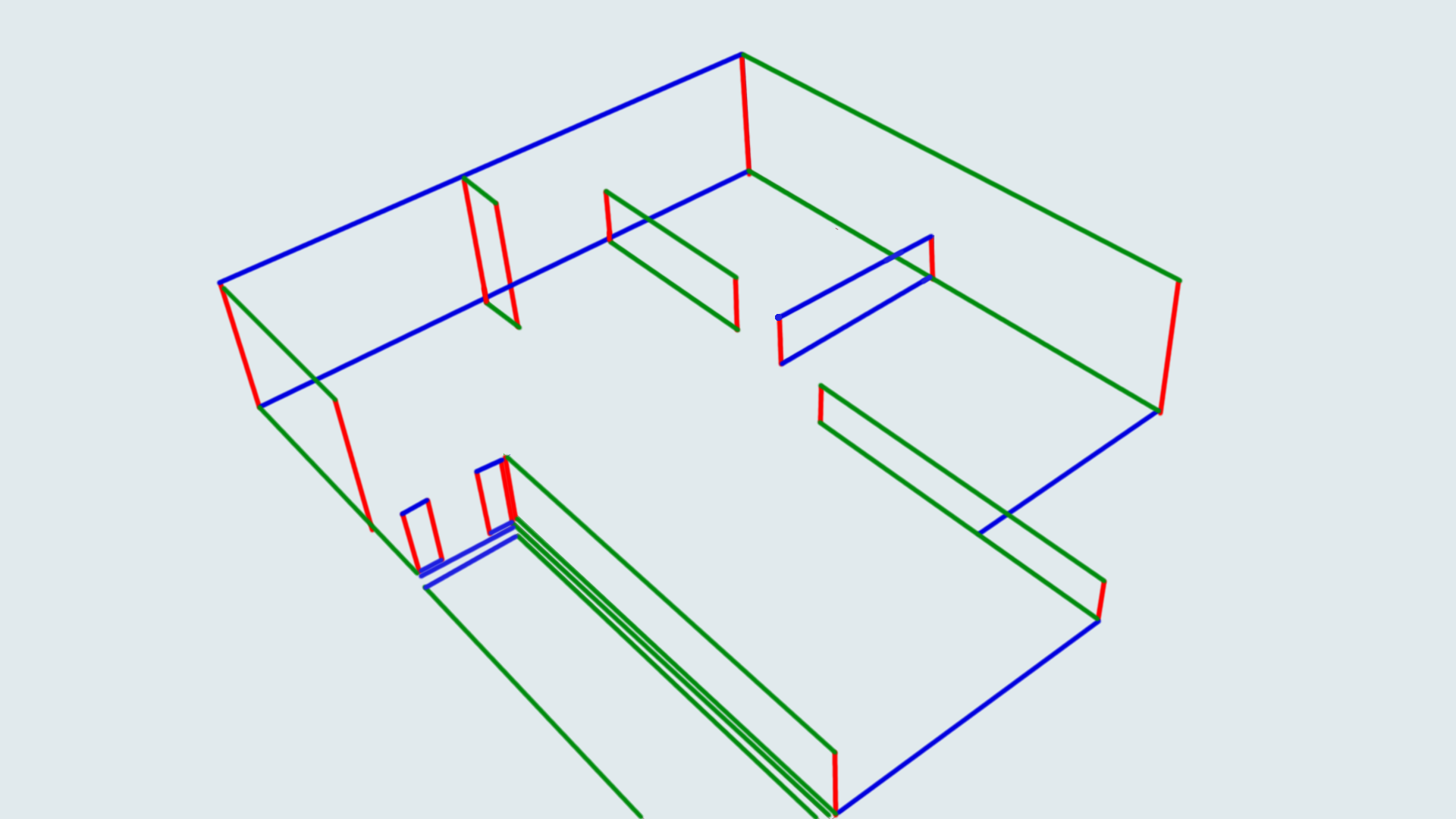
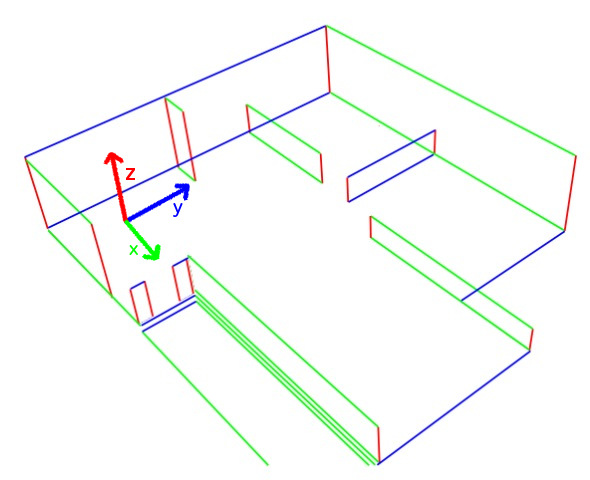
Line segments creation
{% set id_section = "compute_uncertainty" %}
Computation of the uncertainty regions
{% set id_section = "conclusion" %}
Conclusion
- A dataset under CC license
- ... with inertial data
- ... and uncertainty regions
- Open source software
- IMUs can ease the detection of VP
- IMUs are game changer
Dataset webpage: http://ubee.enseeiht.fr/tvpd
{% set id_section = "references" %}
References